A device driver is an integral component in the operating system that enables communication between the OS and the hardware peripherals. This article will guide you through the process of writing a device driver using FreeRTOS, an open-source, real-time operating system for microcontrollers. By reading this, you’ll gain an understanding of the FreeRTOS architecture, along with the specific steps to write a device driver.
To follow along, basic knowledge of C programming and a general understanding of device drivers and RTOS (Real-Time Operating System) concepts are assumed.
What is FreeRTOS?
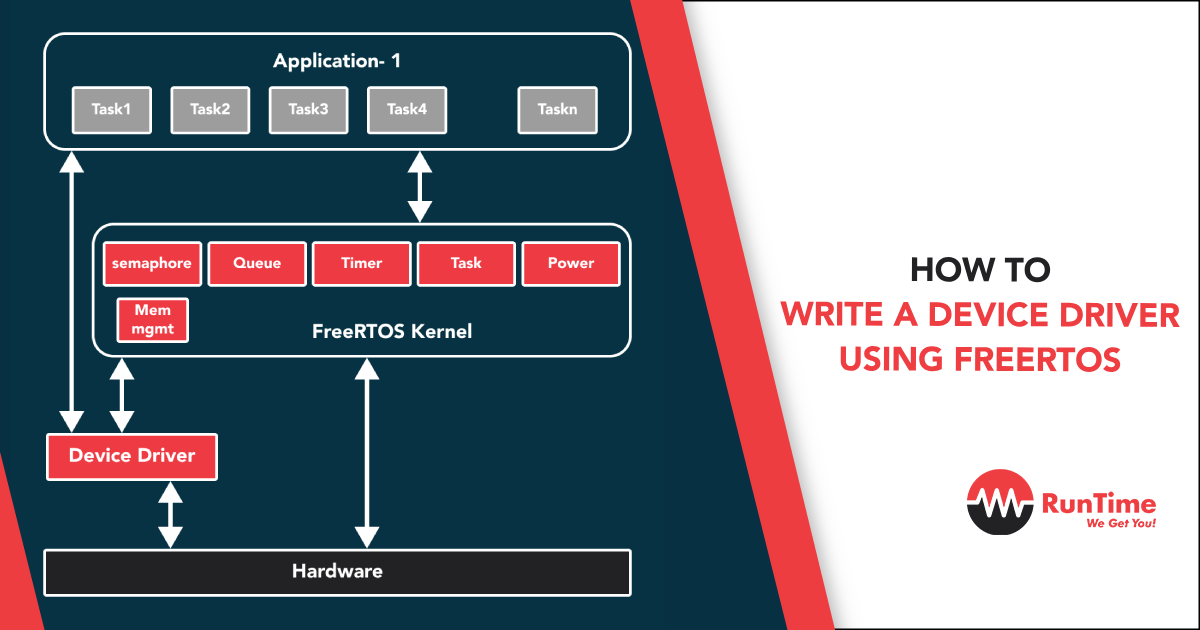
FreeRTOS is a scalable, real-time operating system with a small footprint, making it ideal for embedded systems. It supports task scheduling, inter-task communication, and synchronization, among other things.
Writing a Device Driver
We’ll write a simple device driver for a hypothetical device that performs an operation. Our device driver will be based on the FreeRTOS queue for inter-task communication. A FreeRTOS queue is a data structure that allows multiple tasks to send and receive items from the queue. It’s FIFO-based, meaning that the first item added will be the first item to be removed.
Step 1: Create a Data Structure
First, we’ll define a structure in C that represents the device.
typedef struct {
uint8_t deviceID;
bool isDeviceBusy;
QueueHandle_t deviceQueue;
} device_t;The deviceID identifies the device, isDeviceBusy checks if the device is currently busy, and deviceQueue is a FreeRTOS queue for managing requests.
Step 2: Initialize the Device
Next, we initialize the device with a function that creates a queue and sets initial conditions.
void initializeDevice(device_t *device, uint8_t deviceID) {
device->deviceID = deviceID;
device->isDeviceBusy = false;
device->deviceQueue = xQueueCreate(10, sizeof(int));
if (device->deviceQueue == NULL) {
/* Handle error - Queue was not created */
}
}Step 3: Write the Device Function
Our device function will be a task in FreeRTOS that waits for requests from the queue. When a request arrives, it operates and sends the result back to the requesting task.
void deviceFunction(void *pvParameters) {
device_t *device = (device_t *)pvParameters;
int request;
while (1) {
if (xQueueReceive(device->deviceQueue, &request, portMAX_DELAY)) {
device->isDeviceBusy = true;
/* Perform device operation */
device->isDeviceBusy = false;
}
}
}Step 4: Write the Interface Function
We’ll need a function for other tasks to interact with the device. This function will add a request to the queue and wait for the device to be available.
void interactWithDevice(device_t *device, int request) {
if (device->isDeviceBusy) {
/* Handle device busy situation */
return;
}
xQueueSend(device->deviceQueue, &request, portMAX_DELAY);
}Step 5: Create the FreeRTOS Tasks
Finally, we create a task in FreeRTOS for the device function. The xTaskCreate function in FreeRTOS is used for this purpose.
void main(void) {
device_t device;
initializeDevice(&device, 0);
if (xTaskCreate(deviceFunction, "Device Task", configMINIMAL_STACK_SIZE, &device, 1, NULL) != pdPASS) {
/* Handleerror - Task not created */
}
/* Start the scheduler so the created tasks start executing. */
vTaskStartScheduler();
}Conclusion
This article provided an overview of how to write a device driver using FreeRTOS. Starting from defining the data structure to creating the FreeRTOS tasks, we covered the basics that should give you a strong understanding of the process involved.
The tasks interact through queues, which are powerful tools in FreeRTOS for inter-task communication. The process might seem complex at first, but with practice, you will find that using FreeRTOS to manage and create device drivers allows for organized, efficient, and concurrent operations, particularly suited for real-time systems.
The given example can be further enhanced for handling more complex operations or supporting more advanced device features. Remember that while our example focused on a hypothetical device, you can apply the same principles and techniques to a variety of other devices as well.
As with many things in software development, the key is understanding the underlying concepts and applying them to your specific needs.
Happy Coding!