Ensuring precise and predictable response times is of utmost importance. Engineers working in this domain often face a challenging dilemma known as priority inversion. This article delves into the intricacies of priority inversion and elucidates how interrupts and Real-Time Operating Systems (RTOSs) play a vital role in solving this complex issue.
What is Priority Inversion?
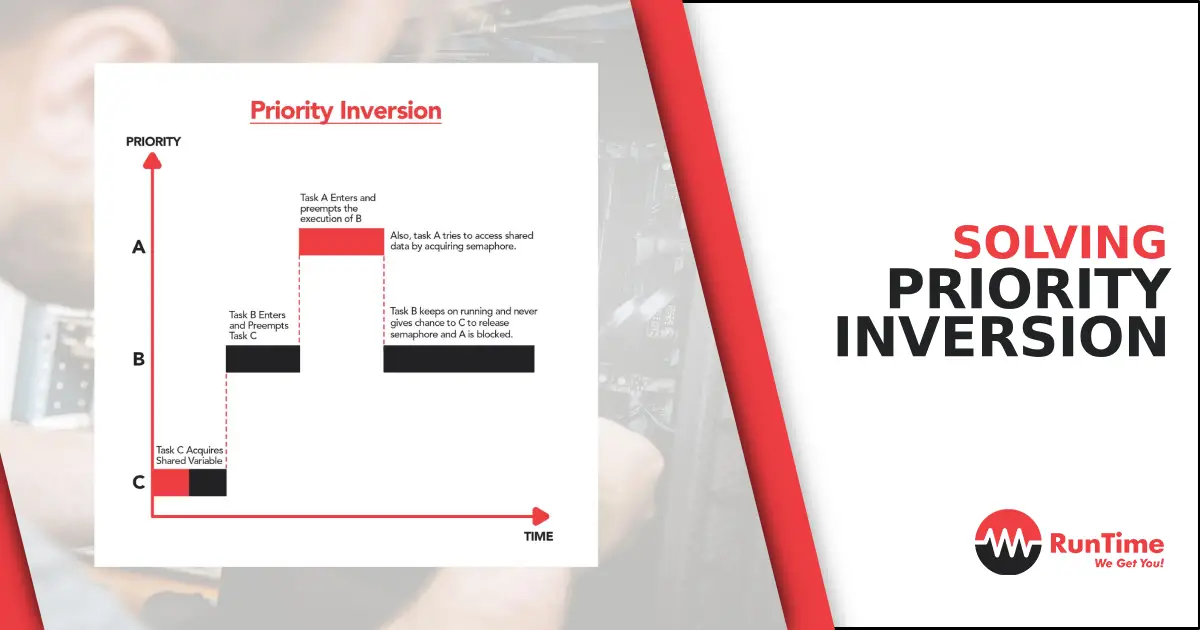
Priority inversion occurs when a low-priority task holds a shared resource needed by a high-priority task. In this situation, the high-priority task is forced to wait, resulting in a delay that can jeopardize the system’s real-time guarantees. This seemingly paradoxical scenario can significantly impact the performance of a real-time system, potentially leading to critical failures.
Example of Priority Inversion
Consider a real-time system that involves a high-priority task responsible for controlling a robotic arm and a low-priority task responsible for logging data from various sensors. Both tasks occasionally need access to a shared resource – the system’s serial communication interface.
Normally, the robotic arm task should take precedence due to its high priority. However, if the logging task gains access to the serial interface, it may hold onto it for an extended period, causing the high-priority task to wait, leading to priority inversion.
The Role of Interrupts
Interrupts are central to the operation of any microcontroller or microprocessor. They are signals that divert the processor’s attention from its current task to respond to an external event. Interrupts enable devices such as sensors, timers, and communication peripherals to notify the processor when data is available or an event has occurred. In real-time systems, interrupts can introduce priority inversion if not managed properly.
In a typical scenario, an interrupt service routine (ISR) handles an interrupt by executing a specific code block. The ISR has its own priority, and in the case of an interrupt-triggered by a low-priority task, it can preempt a higher-priority task. If the ISR accesses a shared resource currently held by a higher-priority task, priority inversion occurs.
To mitigate priority inversion related to interrupts, developers often use techniques such as interrupt nesting, interrupt masking, or carefully designing ISRs to minimize their impact on critical tasks. Properly managing interrupt priorities and using critical sections can help prevent priority inversion.
Example of Interrupt-Induced Priority Inversion
Imagine a real-time system that uses an interrupt to capture sensor data periodically. The sensor interrupt has a lower priority than the main control task. If the interrupt occurs just as the main task is about to access a critical resource, the interrupt may preempt the main task and cause priority inversion, potentially leading to a failure in controlling the system.
To mitigate priority inversion related to interrupts, developers often use techniques such as interrupt nesting, interrupt masking, or carefully designing ISRs to minimize their impact on critical tasks. Properly managing interrupt priorities and using critical sections can help prevent priority inversion.
Solution
In the example above, developers could employ techniques like disabling interrupts temporarily around critical sections of code in the high-priority task to ensure it is not preempted when it accesses the shared resource.
The Role of Real-Time Operating Systems (RTOSs)
RTOSs are essential for managing tasks in real-time systems. They provide a structured way to allocate and prioritize tasks, ensuring that high-priority tasks are given precedence. However, RTOSs can also play a role in both exacerbating and resolving priority inversion.
In cases where an RTOS schedules tasks in a way that doesn’t account for the potential for priority inversion, the problem can worsen. For instance, if a low-priority task is frequently being scheduled right after a high-priority task, priority inversion may become more pronounced. Proper RTOS configuration and scheduling policies are crucial to mitigate priority inversion. Developers can use mechanisms like priority inheritance and priority ceiling protocols to prevent priority inversion from occurring within the RTOS.
Priority Inheritance Protocol: This protocol temporarily boosts the priority of a task holding a shared resource to the level of the highest-priority task waiting for that resource. This ensures that the high-priority task can access the resource without suffering from priority inversion.
Priority Ceiling Protocol: In this protocol, each shared resource is assigned a priority ceiling. When a task wants to access a resource, its priority is temporarily raised to the ceiling of the resource, preventing priority inversion during resource access.
Combining the power of RTOSs with interrupt management can lead to an effective strategy for solving priority inversion in real-time systems.
Example of RTOS-Induced Priority Inversion
Consider an RTOS that uses a default round-robin scheduling policy. If a high-priority task is frequently scheduled right after a low-priority task that holds a shared resource, it can suffer from priority inversion. This is because the low-priority task repeatedly blocks the high-priority task, causing it to wait unnecessarily.
Priority Inheritance Protocol: This protocol temporarily boosts the priority of a task holding a shared resource to the level of the highest-priority task waiting for that resource. This ensures that the high-priority task can access the resource without suffering from priority inversion.
Solution
In the example above, implementing the priority inheritance protocol within the RTOS can resolve priority inversion. When the high-priority task needs access to the shared resource held by the low-priority task, the low-priority task’s priority is temporarily elevated, allowing the high-priority task to complete its work without unnecessary delays.
Conclusion
Priority inversion is a common challenge faced by engineers working on real-time systems and embedded computing. To ensure that high-priority tasks receive the timely attention they require, understanding and managing the role of interrupts and RTOSs is crucial.
Proper interrupt management and the use of RTOS scheduling mechanisms, such as the priority inheritance and priority ceiling protocols, can help prevent and resolve priority inversion, ensuring the reliability and performance of real-time systems. In the ever-evolving world of real-time computing, addressing priority inversion is a critical step toward achieving precise and predictable system behavior.
Hire the Best Engineers with RunTime Recruitment
Our expert team of engineers-turned-recruiters offers in-depth knowledge of technical recruiting in the engineering industry.
If your company is looking to recruit highly skilled engineers worldwide, contact us today and we will do the sourcing for you. Or if you’re an engineer looking for new opportunities, you can check RunTime Recruitment’s job site for job vacancies.